V tem blogu bo poudarek na tem, kako pridobiti uteži sloja modela v PyTorchu.
Kakšne so teže sloja modela v PyTorchu?
“ Uteži « in » Pristranskosti ” sta bistveni značilnosti modelov nevronske mreže. Oba sta učljiva parametra, ki se redno posodabljata med učno zanko z vsakim prehodom modela naprej. Ta redna posodobitev je posledica integriranega optimizatorja, kot je optimizator Adam. Cilj modelov nevronskih mrež je narediti natančne napovedi na podlagi vhodnih podatkov, uteži in pristranskosti pa se uporabijo za prilagoditev teh rezultatov za zmanjšanje izgube.
Kako pridobiti uteži sloja modela v PyTorchu?
' uteži ” plasti so shranjene v slovarju Python in uporabljajo sintakso “ state_dict() ”. Slovar se uporablja za priklic uteži po spodnjih korakih:
1. korak: odprite Colab IDE
Ta vadnica se bo začela z izbiro IDE za projekt. Pojdite v Colaboratory Spletna stran in začni ' Nov zvezek ” za začetek dela:
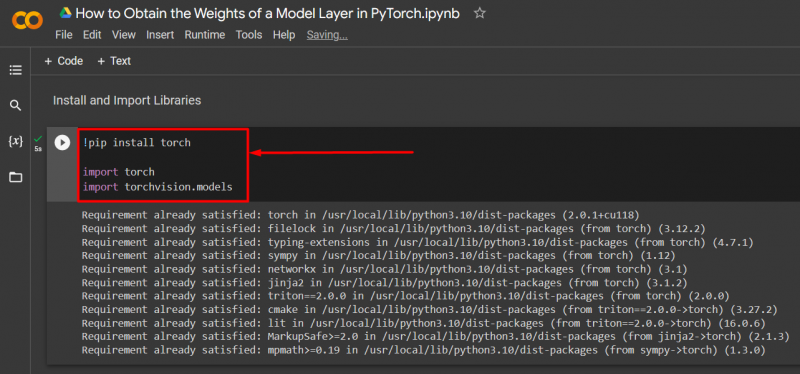
2. korak: Namestite in uvozite knjižnice
Po nastavitvi zvezka Colab, ' namestite « in » uvoz ” knjižnice, ki pokrivajo vse zahtevane funkcionalnosti v projektu:
! pip namestite svetilkouvoz svetilka
uvoz torchvision. modeli
Zgornja koda deluje na naslednji način:
- ' pip » namestitveni program paketov iz pythona se uporablja za namestitev bistvenega » svetilka ' knjižnica.
- Nato je ' uvoz ” se uporablja za uvoz v projekt.
- Nazadnje, ' torchvision.modeli ” je tudi uvožen paket za dodano funkcionalnost modelov globokega učenja:
3. korak: uvozite model ResNet
V tej vadnici je » ResNet50 ” Za predstavitev je uporabljen model nevronske mreže s 50 plastmi, ki jih vsebuje knjižnica torchvision. Uvozite predhodno usposobljen model, kot je prikazano:
vzorec_modela = torchvision. modeli . resnet50 ( predhodno usposobljeni = Prav ) 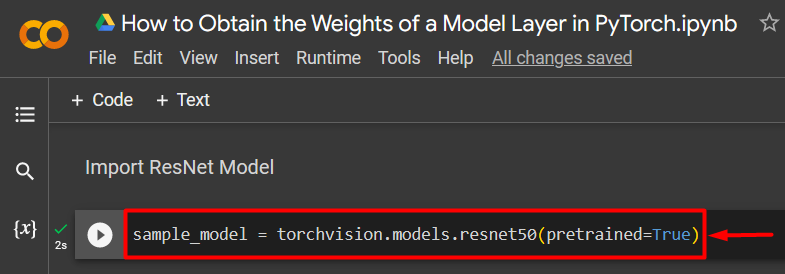
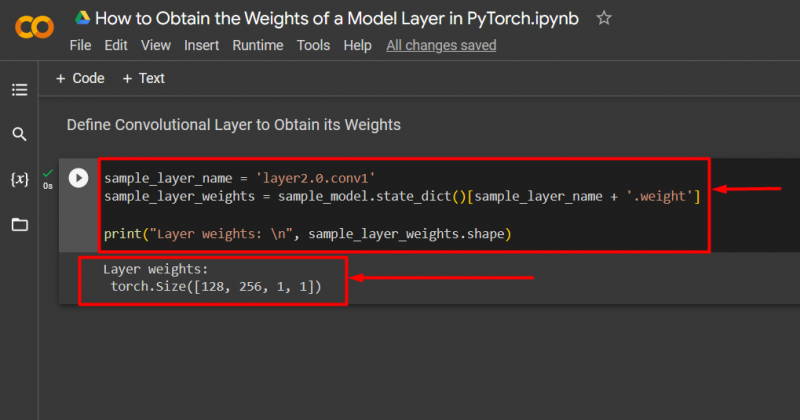
4. korak: Določite plast modela
Določite ime plasti modela in uporabite » state_dict() ” za pridobitev njegovih uteži, kot je prikazano:
ime_plasti_vzorca = 'layer2.0.conv1'uteži_plasti_vzorca = vzorec_modela. state_dict ( ) [ ime_sloja vzorca + '.utež' ]
tiskanje ( 'Teže plasti: \n ' , uteži_plasti_vzorca. oblika )
Zgornja koda deluje na naslednji način:
- Druga zvita plast modela ResNet50 je dodeljena ' ime_plasti_vzorca ” spremenljivka.
- Potem, ' state_dict() ' metoda se uporablja z ' vzorec_modela ' in so dodeljeni ' uteži_plasti_vzorca ” spremenljivka.
- ' ime_plasti_vzorca ' in ' .utež « so dodani kot argumenti » state_dict() ” za pridobitev uteži.
- Na koncu uporabite » natisni() ” za predstavitev uteži plasti kot rezultat:
Spodnji rezultat kaže, da smo pridobili uteži plasti modela v Pytorchu:
Opomba : Do našega zvezka Colab lahko dostopate tukaj povezava .
Pro-Nasvet
Uteži sloja modela znotraj PyTorcha prikazujejo napredek vadbene zanke. Te uteži se uporabljajo za ugotavljanje rasti modela, ko obdeluje vhodne podatke v izhodne rezultate in napovedi. Pridobivanje uteži sloja je pomembno pri ocenjevanju kakovosti rezultatov in preverjanju, ali so potrebne izboljšave ali ne.
uspeh! Pokazali smo, kako pridobiti uteži plasti modela PyTorch.
Zaključek
Pridobite uteži plasti modela v PyTorchu z uporabo “state_dict() ” po uvozu modela iz torchvisiona ali uporabi modela po meri. Uteži sloja modela so naučljivi parametri, ki se nenehno posodabljajo med usposabljanjem in katalogizirajo njegov napredek. V tem članku smo pokazali, kako uvoziti model ResNet50 iz torchvisiona in pridobiti uteži njegove druge zvite plasti.