Platforma Arduino ljudem omogoča ustvarjanje različnih projektov. Arduino je uporabniku prijazna platforma s podporo za široko paleto knjižnic, vključno z SoftwareSerial knjižnica . The SoftwareSerial knjižnica vam omogoča, da ustvarite serijska vrata na katerem koli od digitalnih zatičev na vaši plošči Arduino.
V tem članku se bomo poglobili v knjižnico SoftwareSerial in raziskali, kako deluje.
Uvod v knjižnico SoftwareSerial
The SoftwareSerial knjižnica je standardna knjižnica Arduino, ki omogoča serijsko komunikacijo na digitalnih zatičih, ki niso TX in RX. Knjižnica omogoča ustvarjanje serijskih vrat programske opreme, ki se lahko uporabljajo za komunikacijo z drugimi napravami, kot so drugi mikrokontrolerji, računalniki ali celo moduli Bluetooth. Knjižnica SoftwareSerial je vključena v Arduino IDE in jo je mogoče uporabiti s katero koli ploščo Arduino.
Opomba: Na splošno TX in RX zatiči se uporabljajo za serijsko komunikacijo, vendar z uporabo te knjižnice lahko plošči Arduino omogočimo uporabo katerega koli od digitalnih zatičev za zamenjavo zatičev TX in RX.
Razumevanje funkcij knjižnice SoftwareSerial
The SoftwareSerial knjižnica ima več funkcij, ki vam omogočajo nastavitev in nadzor serijskih vrat programske opreme. Tukaj je nekaj glavnih funkcij, ki jih morate poznati:
SoftwareSerial()
Ta funkcija ustvari nov primerek SoftwareSerial razred. Ta funkcija ima dva argumenta, RX pin in TX pin. Na primer, če želite ustvariti serijska vrata programske opreme na nožicah 2 in 3, bi uporabili naslednjo kodo:
SoftwareSerial mySerial ( 2 , 3 ) ; // RX, TX
The SoftwareSerial() metoda se uporablja za ustvarjanje novega primerka a SoftwareSerial predmet. Omogoča ustvarjanje več primerkov, vendar je hkrati lahko aktiven le eden.
Sintaksa
Sintaksa za SoftwareSerial() metoda je naslednja:
SoftwareSerial ( rxPin, txPin, inverzna_logika )
Parametri
Parametri za SoftwareSerial() so
rxPin: Ta parameter določa pin, ki bo uporabljen za sprejem serijskih podatkov.
txPin: Ta parameter določa pin, ki bo uporabljen za prenos serijskih podatkov.
obratna_logika: Ta parameter je neobvezen in obrne smisel dohodnih bitov. Privzeta vrednost je false, kar pomeni, da se LOW na zatiču RX interpretira kot 0-bit in HIGH kot 1-bit. Če je nastavljeno na true, bo LOW na zatiču RX zdaj 1-bitni, HIGH pa 0-bitni.
Vrnitev
The SoftwareSerial() ne vrača ničesar.
Funkcije knjižnice Arduino SoftwareSerial().
Arduino SoftwareSerial() ima seznam funkcij za serijsko komunikacijo med napravami. Nekaj glavnih funkcij je obravnavanih tukaj:
začeti()
The začeti() funkcija inicializira serijska vrata programske opreme s hitrostjo prenosa. Hitrost prenosa je hitrost prenosa podatkov prek serijskih vrat. Na primer, če želite nastaviti 9600 kot hitrost prenosa za serijsko komunikacijo, bi uporabili naslednjo kodo:
mySerial.begin ( 9600 ) ;
na voljo()
The na voljo() f unction vrne bajte, ki so na voljo za branje na serijskih vratih programske opreme. Če želite na primer preveriti, ali so na voljo kakršni koli podatki za branje, bi uporabili naslednjo kodo:
če ( mySerial.available ( ) > 0 ) {// prebrati vhodni podatki
char incomingByte = mySerial.read ( ) ;
}
preberi()
The preberi() funkcija prebere naslednji bajt podatkov iz serijskih vrat programske opreme. Če želite na primer prebrati bajt podatkov in ga natisniti na serijski monitor, bi uporabili naslednjo kodo:
char incomingByte = mySerial.read ( ) ;Serial.println ( incomingByte ) ;
pisati()
The pisati() funkcija zapiše bajt podatkov v serijska vrata programske opreme. Na primer, da pošljete pismo 'A' prek serijskih vrat programske opreme bi uporabili naslednjo kodo:
mySerial.write ( 'A' ) ;
Primer kode knjižnice Arduino SoftwareSerial().
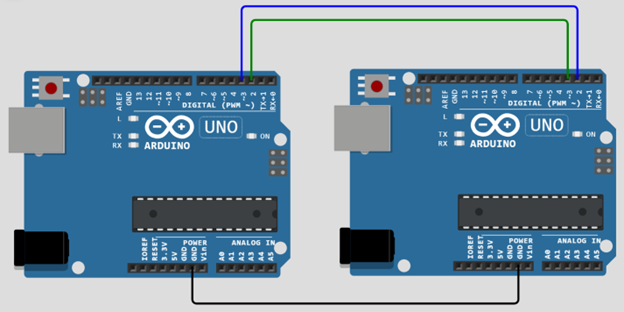
Zdaj bomo s to knjižnico komunicirali med dvema ploščama Arduino prek serijske komunikacije. Vzemite dve plošči Arduino in ju povežite, kot je prikazano na spodnji sliki.
Povežite se D2 plošče Master Arduino z D3 plošče Slave Arduino, podobno povežite D3 mojstra Arduino z D2 suženjskega Arduina.
Opomba: Za serijsko komunikacijo je TX pin je vedno povezan z RX zatič nasprotnega Arduina in RX pin glavnega je vedno povezan z TX pin drugega Arduina.
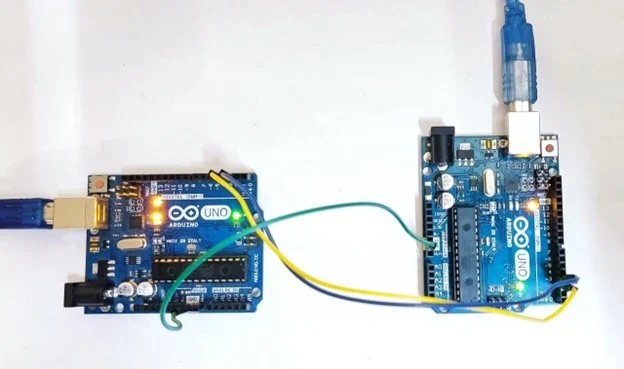
Sledi strojna oprema obeh plošč Arduino.
Tukaj je primer kode Arduino, ki prikazuje, kako uporabljati SoftwareSerial knjižnica za vzpostavitev komunikacije med dvema ploščama Arduino:
Koda plošče pošiljatelja
Spodnja koda je za Arduino pošiljatelja, ki bo zapisal niz na Arduino ploščo sprejemnika.
#include// Nastavite serijski objekt programske opreme
SoftwareSerial mySerial ( 2 , 3 ) ;
nastavitev praznine ( ) {
// Zaženite serijsko komunikacijo
Serial.begin ( 9600 ) ;
medtem ( ! Serijski ) {
; // čakati za serijska vrata za povezavo
}
// Zaženite serijsko komunikacijo programske opreme
mySerial.begin ( 9600 ) ;
}
prazna zanka ( ) {
// Pošljite sporočilo prek serijske povezave programske opreme
mySerial.println ( 'Pozdravljena, sprejemna plošča!' ) ;
zamuda ( 1000 ) ;
}
Koda sprejemne plošče
Spodnja koda je za sprejemno ploščo. Z uporabo te kode bo Arduino prejel niz od druge plošče prek serijske komunikacije, vzpostavljene med dvema ploščama Arduino.
#include// Nastavite serijski objekt programske opreme
SoftwareSerial mySerial ( 2 , 3 ) ;
nastavitev praznine ( ) {
// Zaženite serijsko komunikacijo
Serial.begin ( 9600 ) ;
medtem ( ! Serijski ) {
; // čakati za serijska vrata za povezavo
}
// Zaženite serijsko komunikacijo programske opreme
mySerial.begin ( 9600 ) ;
}
prazna zanka ( ) {
// Preverite če podatki so na voljo na programski serijski povezavi
če ( mySerial.available ( ) ) {
// Preberite podatke in jih natisnite na serijski monitor
Serial.println ( mySerial.readString ( ) ) ;
}
}
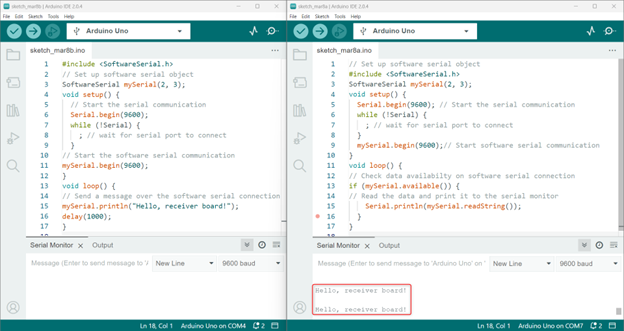
V tem primeru najprej vključimo SoftwareSerial knjižnica na začetku kode. Nato ustvarimo a SoftwareSerial predmet imenovan ' mySerial ” z zatičima 2 in 3, ki sta določena kot zatiča RX oziroma TX.
V nastaviti() funkcijo zaženemo serijsko komunikacijo strojne in programske opreme s hitrostjo prenosa 9600. zanka() funkcijo plošče pošiljatelja, pošljemo sporočilo prek programske serijske povezave z metodo mySerial.println() in počakamo sekundo, preden pošljemo naslednje sporočilo.
V funkciji loop() sprejemne plošče bo koda preverila razpoložljivost serijskih podatkov na serijski povezavi programske opreme z uporabo mySerial.available() metoda. Če so na voljo podatki, jih preberemo z metodo mySerial.readString() in jih natisnemo na serijski monitor z metodo Serial.println().
Omejitve knjižnice SoftwareSerial().
The SoftwareSerial knjižnica ima več različnih prednosti, vendar ima tudi nekatere omejitve, ki se jih morajo uporabniki zavedati. Te omejitve vključujejo
- Nezmožnost hkratnega prenosa in sprejemanja podatkov.
- Pri uporabi več serijskih vrat programske opreme lahko samo ena vrata sprejemajo podatke hkrati.
- Zaporedna vrata na osnovi programske opreme, ustvarjena s to knjižnico, delujejo pri nižjih hitrostih prenosa in niso tako zanesljiva kot serijska vrata na osnovi strojne opreme.
- Nekateri zatiči na ploščah Mega in Mega 2560 ne podpirajo prekinitev spremembe za RX, kar omejuje, katere zatiče je mogoče uporabiti.
- Podobno je na ploščah Leonardo in Micro mogoče za RX uporabiti samo določene nožice zaradi pomanjkanja prekinitev sprememb.
- Največja hitrost RX na ploščah Arduino ali Genuino 101 je 57600 bps.
- RX ne deluje na digitalnem pinu 13 plošč Arduino ali Genuino 101.
| Deska | RX zatiči |
| Mega in Mega 2560 | 10, 11, 12, 13, 14, 15, 50, 51, 52, 53, A8 (62), A9 (63), A10 (64), A11 (65), A12 (66), A13 (67), A14 (68), A15 (69).
|
| Leonardo & Mic | 8, 9, 10, 11, 14 (MISO), 15 (SCK), 16 (MOSI). |
Zaključek
The SoftwareSerial knjižnica v Arduinu je uporabno orodje za komunikacijo z napravami, ki uporabljajo serijske komunikacijske protokole. Razvijalcem omogoča, da ustvarijo serijska vrata na osnovi programske opreme, ki jih je mogoče uporabiti v povezavi s serijskimi vrati na osnovi strojne opreme. Ta knjižnica ima nekaj omejitev, saj ne omogoča hkratnega prenosa podatkov. Za več podrobnosti preberite zgornji članek.